By
1.若只有Kp控制,求单位阶跃扰动的稳态误差。
2.若有Kp,Ki控制, 求单位斜率上升的稳态误差。
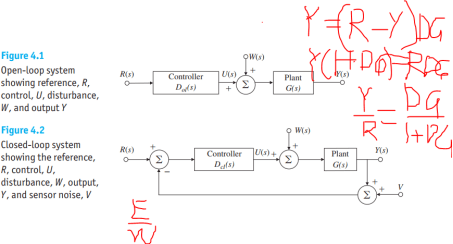
U=-DY
Y=(W+U).G=(W-DY)G===>Y+DYG=WG===>-Y/W=-G/(1+DG)=
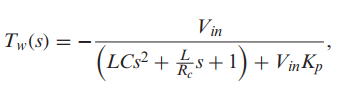
下列Plant传递函数带入上式:
2.Dc=Kp+Ki/s
有了扰动的传递函数,求稳态误差令t->无穷, 则s->0. 有速度则需要除s(即乘t)。