3.1.优化概述
3.1.1.优化的目的
优化的目的是为了设计和制造出成像质量”最好”的光学系统, 同时也满足事先给定的一组物理和其它约束条件. 术语”最好”是用一个误差函数(Merit Function)来计量, 误差函数把图像的误差数据加权组合成一个单一的数值,并使该数字尽可能小. 虽然各种控制和权重可以方便的修改, 但是在CodeV的基本结构中已经预先定义了误差函数. 你甚至可以自己定义一个误差函数来代替default误差函数, 但是这样做的难度会更多, 且事实上没必要.
3.1.2.优化方法
CodeV的优化属性称为自动优化,缩写为AUTO. AUTO使用一种加速阻尼最小二乘法(DLS), 使可以改变系统像质的变量发生变化. 约束要求对搜索最佳解设置边界条件. 如果需要AUTO会使用Lagrangian乘数强行加入约束条件. 这就可以对约束条件进行精确控制,而不要求限制条件被包括在误差函数本身中, 通常会在限定求解区域内比较快和比较平稳的收敛到一个最优解.
3.1.3.缺省
内嵌在AUTO里面的缺省值可以让设计者无需注意误差函数结构细节, 以最少的输入要求使用AUTO. 同时,对于后面设计阶段进行的一些特殊设计或精细调整来说, 如果需要, 很多可选的控制,权重,约束等都会使设计者有更大的灵活性.
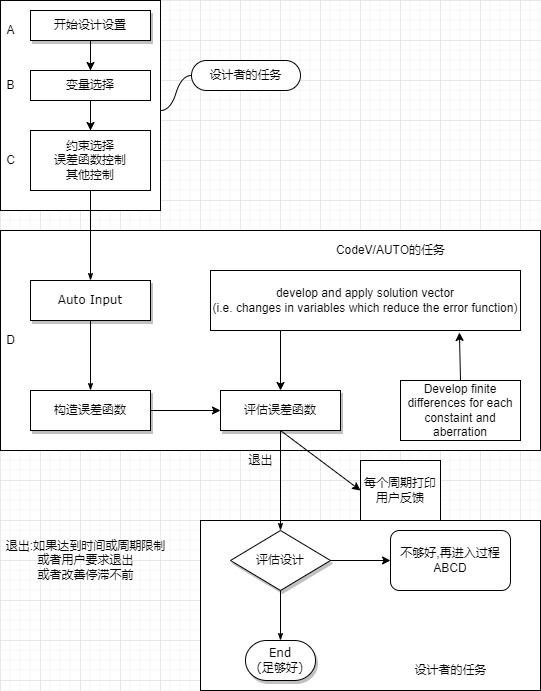
3.1.4.AUTO(自动优化)过程
虽然您可以把AUTO当作一个黑匣子并得到设计结果, 但是了解其内在流程会有所裨益. 下面的框图表示了设计过程的一般流程, 包含AUTO管理的部分. 随着我们设置并运行一个例子,各个步骤的含义会更清楚. CodeV Reference Manual的第三章”Discussion of Input and Computations P352″详细讲述了自动设计,有助于理解AUTO的工作原理和过程.
3.1.5.局部优化和全局优化
如果把误差函数想象为多维空间中的众多山峰和山谷, 那么优化的目的就是找到尽可能低的山谷. 在局部优化在将会找到距起始点最近的山谷. 全局优化会在搜寻最深的山谷过程中从起始点向更远处探测山谷, 即期望全局最佳. CodeV的全局综合(GS, Global Synthesis)具有极好的全局优化属性. 它可以从一个实际的起点出发,得到多个解.
3.2.操作规则
这一章看上去似乎有很多步骤,但是实际上就几步,加上一些说明性内容. 再次概述优化一个镜头所需的操作过程. 除了变量是在LDM中确定,分析和检查是在MTF和FIELD选项中完成外, 在此叙述的步骤都将在Automatic Design选项对话框中执行(Optimization菜单):
a.把所有曲率半径,厚度和虚拟玻璃都设为变量,然后保存修改过的起始点.
b.确保所有的玻璃元件都有足够的厚度(General Constraints列表).
c.确保所有玻璃的折射率不会太高(General Constraints列表).
d.限制有效焦距等于当前的6mm(Specific Constraints列表).
e.在每一次优化循环后都绘制透镜视图(Output Control列表).
f.使用缺省的光斑尺寸误差函数(Spot Diagram,光线的横向像差),但是在网格中追迹更多的光线(Error Function Definitions and Controls列表).
g.再次使用前面的评价准则来分析镜头(点击上一章视窗的最新资料,主要是View, MTF和Field选项).
h.修改AUTO设置(主要是Error Function Weights列表), 改善优化结果.
下节开始详细叙述.
